
Jak wybrać silniki kołowrotów dla pieszych: oparte na danych porównanie długości życia, prędkości i stabilności
Przy zakupie dla pieszychkołowrotywielu klientów początkowo koncentruje się na wyglądzie, materiałach lub metodach identyfikacji (karty RFID, rozpoznawanie twarzy, kody QR).
Jednak w rzeczywistym działaniu projektu podstawowy czynnik, który naprawdę determinuje stabilność sprzętu, trwałość i wygodę użytkownika, leży na głębszym poziomie:
Z punktu widzenia inżynierii i zastosowań artykuł ten łączy specyfikacje techniczne z doświadczeniem terenowym, aby pomóc Ci zrozumieć różnice między rozwiązaniami silnikowymi i wybrać optymalny dla Twojego projektu.
1. Dlaczego silnik definiuje stabilność kołowrotu?
Na podstawie danych eksploatacyjnych i konserwacyjnych z licznych projektów bram dla pieszych statystyki pokazują, że:
a) Około 60%–70% awarii sprzętu ma swoje źródło w systemie ruchu.
b) Ponad 50% tych problemów jest bezpośrednio związanych z silnikiem i jego elementami napędowymi. Oznacza to, że układ silnika jest głównym czynnikiem determinującym żywotność, stabilność i ogólną przepustowość kołowrotu.
W zastosowaniach terenowych często spotyka się następujące scenariusze:
c) Początkowe działanie przebiega płynnie i normalnie.
d) Po 1–2 latach użytkowania w sprzęcie zaczynają pojawiać się zacięcia, nietypowe dźwięki i częste awarie.
Podczas śledzenia pierwotnej przyczyny większość tych problemów jest bezpośrednio powiązana z typem silnika i metodologią jego sterowania.
2. Porównanie podstawowych danych różnych rozwiązań silnikowych
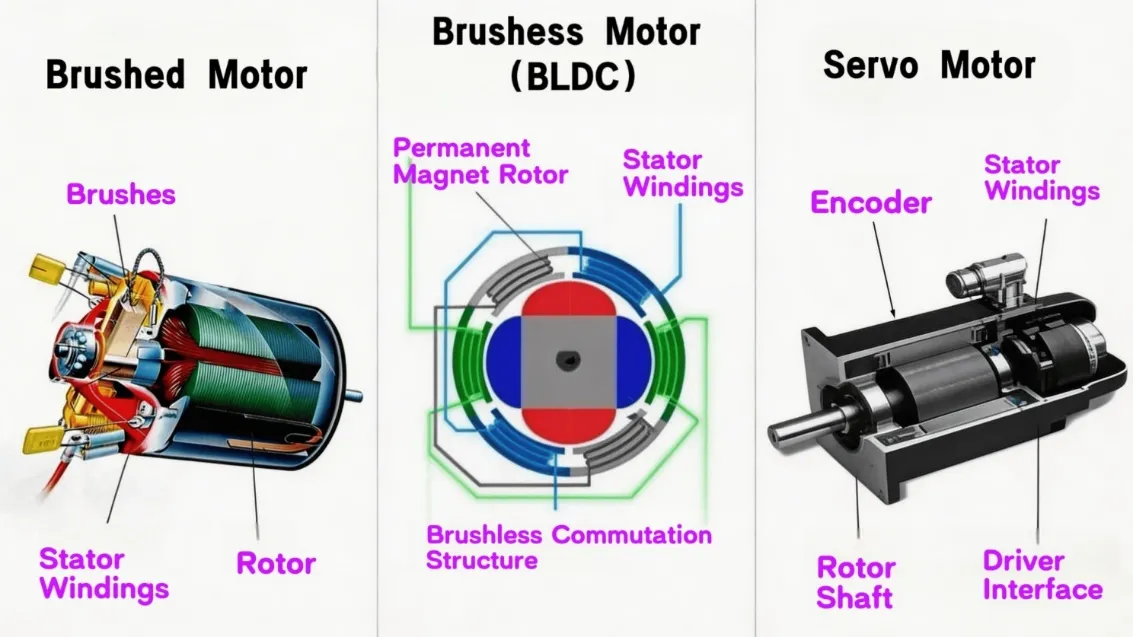
Obecnie pieszykołowrotyna rynku wykorzystują głównie trzy rozwiązania silnikowe: silniki szczotkowe, bezszczotkowe silniki prądu stałego (BLDC) i serwomotory. Poniżej znajduje się porównanie typowych parametrów inżynierskich (zakresy standardów branżowych:
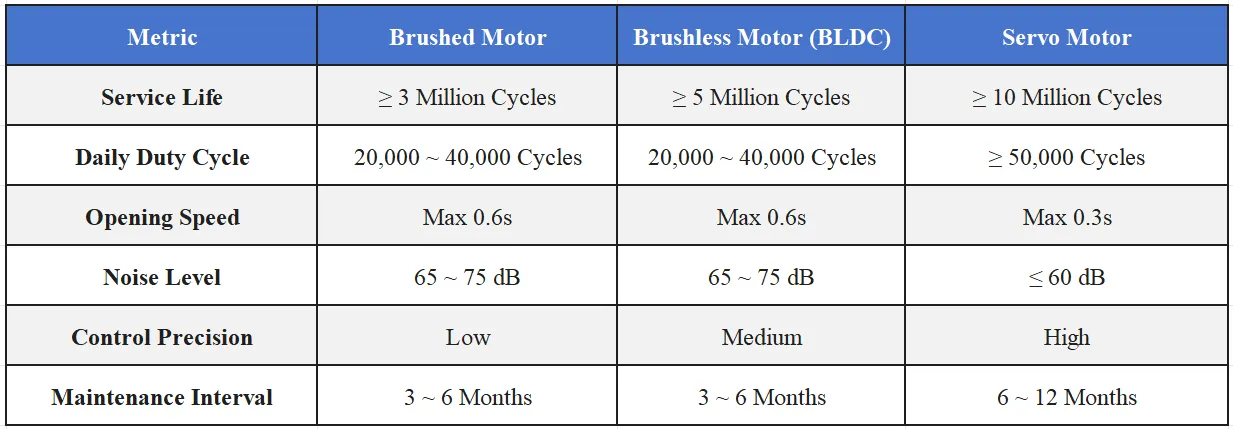
Przy wyborze projektu zazwyczaj priorytetowo traktujemy rozwiązania silnikowe w oparciu o częstotliwość przepustowości i żywotność, a nie po prostu porównując koszty sprzętu. W porównaniu z tradycyjnymi silnikami szczotkowymi, silniki bezszczotkowe (BLDC) mogą wydłużyć żywotność 2–3 razy, podczas gdy serwosilniki zapewniają dalszy postęp w zakresie szybkości, precyzji i bezpieczeństwa.
3. Wydajność przepustowości: wymierna poprawa doświadczenia użytkownika
Wielu klientów wyraża chęć posiadania „gładszych kołowrotów”, ale „gładkość” jest w rzeczywistości wskaźnikiem wymiernym.
a) Szybkość otwarcia (bezpośredni wpływ na kolejkowanie)
Szczotkowany silnik: ok. 0,6 s
Silnik bezszczotkowy (BLDC): ok. 0,6 s
Serwosilnik: tak szybko, jak 0,3 s
W budynkach biurowych i projektach parków przemysłowych (o dziennym ruchu przekraczającym 20 000 osób) wyraźnie widać następujące wskaźniki przepustowości:
Szczotkowany silnik: ok. 25–35 osób/minutę
Silnik bezszczotkowy (BLDC): ok. 25–35 osób/minutę
Serwomotor: 35+ osób/minutę
Różnica jest natychmiast odczuwalna, niezależnie od tego, czy w lobby panuje kolejka, czy też
przeludnienie.
b) Płynność działania (eliminacja „zacinania się”)
Najważniejszym czynnikiem jest zdolność do kontrolowania przyspieszania i zwalniania:
Silnik szczotkowany: Brak kontroli → Ostre cykle uruchamiania/zatrzymywania.
Silnik bezszczotkowy (BLDC): Podstawowe profile ruchu → Ogólnie gładki.
Serwomotor: Przyspieszanie/zwalnianie według krzywej S → Praktycznie bez uderzeń.
W scenariuszach tranzytu o wysokiej częstotliwości różnice te stale się wzmacniają, co bezpośrednio wpływa na ogólne wrażenia użytkownika.
c) Kontrola hałasu (wpływ na środowisko)
Komercyjne środowiska biurowe zazwyczaj wymagają: Poziomu hałasu ≤ 50 dB
Silnik szczotkowany: 60+ dB (Zauważalny hałas).
Silnik bezszczotkowy (BLDC): Ogólnie zgodny z normami.
Serwomotor: Prawie cicha praca.
4. Możliwości bezpieczeństwa: Krytyczny wpływ zmian silnika
a) Szybkość reakcji zapobiegającej przyszczypnięciu
b) Silnik szczotkowany: 100–300 ms
c) Silnik bezszczotkowy (BLDC): 50–100 ms
d) Serwomotor: 10–50 ms
e) Im krótszy czas reakcji, tym wyższy poziom bezpieczeństwa – różnica, która staje się krytyczna w scenariuszach o dużym natężeniu ruchu.
Podsumowanie: Jak uniknąć typowych pułapek w selekcji?
Jeśli odbierzesz tylko jedną rzecz, niech będzie tak: Prawdziwa różnica między kołowrotami nie polega na ich estetyce zewnętrznej, ale na silnikach i systemach sterowania.
Mówiąc bardziej szczegółowo:
a) Scenariusze z niską częstotliwością: Silniki szczotkowe są realną opcją.
b) Projekty standardowe: Preferowanym wyborem są silniki bezszczotkowe (BLDC).
c) Projekty wysokiej klasy: Wysoce zalecane są serwomotory.
Konkluzja: Wybór niewłaściwego silnika prowadzi do bieżących kosztów konserwacji; wybór odpowiedniego silnika sprawi, że Twój sprzęt stanie się trwałym, stabilnym aktywem. Jeśli jesteś obecnie na etapie wyboru projektu, zalecam skupienie się na następujących kluczowych obszarach: typ silnika (bezszczotkowy czy serwo), metoda sterowania (czy obejmuje kontrolę przyspieszania i zwalniania), udokumentowane osiągnięcia (dostępność rzeczywistych danych operacyjnych projektu). W przypadku konkretnych projektów dostosowanie silnika i schematu sterowania do rzeczywistych wymagań ruchu drogowego jest często znacznie skuteczniejsze niż zwykłe porównanie specyfikacji technicznych.



